바로가기 메뉴
본문 바로가기
푸터 바로가기
서울대학교
서울대포털
입학포털
증명발급
Home
Login
교양교육과정
영역 및 교과목
교양교육과정 구성
영역별 교과목
학문의 기초
학문의 세계
선택교양
공통필수
대학글쓰기
대학영어
수강규정
수강자격 확인
유의사항
LAB 소개
영어 글쓰기 교실
자주하는질문
이수규정
대학별 이수규정
유의사항
대학글쓰기 교과목
제2외국어 교과목
수학 교과목
과학 교과목
신입생세미나·사회봉사 교과목
수강편람
SNUgenie
자율연구
창의와 도전
소개
창의와 도전 프로그램 소개
창의와 도전 프로그램 개요
개설강의목록
2023년
2022년
2021년
2020년
2019년
강의소개영상
촬영장비대여
학생자율교육프로그램
소개
프로그램 소개 및 유형
프로그램 목적
학생자율연구
프로그램 개요
교과목 수강자격
신청 및 이수과정
성적부여 및 유의사항
지도교수 및 대학원생조교
학생자율세미나
프로그램 개요
세미나 개설자격
신청 및 이수과정
지도교수 및 대학원생조교
성적부여 및 유의사항
가치탐구와 실천
프로그램 개요
프로그램 일정
연구지원
신청 및 선정절차
연구신청 및 수강조건
학부생 연구지원
프로그램 개요
연구신청 및 지원자격
신청 및 선정절차
연구지원
프로그램 일정
2024 온라인 포스터 세션
교육·학생지원
강의조교 (작은스승)
피어튜터링
소개
교과목 안내
인문사회
기초수학/과학
교과맞춤형
예비대학
예비대학이란?
예비대학 수강가이드
학생참여프로그램
휴먼튜브 영상 공모전
소개
지난대회
제7회
제6회
제5회
제4회
제3회
제2회
제1회
참가신청
SNU 토론한마당
소개
지난대회
제9회
제8회
제7회
제6회
제5회
제4회
제3회
제2회
제1회
참가신청
SNU 공공미술 프로젝트
소개
지난대회
제4회
제3회
제1회
참가신청
SNU 고전 100
소개
지난프로그램
SNU 고전 100 2023년 2학기
SNU 고전 100 2023년 1학기
SNU 고전 100 2022년 2학기
SNU 고전 100 2022년 1학기
SNU 고전 100 2021년 2학기
SNU 고전 100 2021년 1학기
SNU 고전 100 2020년 2학기
SNU 고전 100 2020년 1학기
SNU 고전 100 2019년 2학기
컴퓨팅 프로젝트 경진대회
소개
공지사항
자주 하는 질문
교수학습센터
교수지원 프로그램
교수법 워크숍
예비교수자 양성과정
강의 촬영 및 컨설팅
공과대학/자연과학대학 컨설팅
신규임용교원 강의컨설팅
온라인 교수법 콘텐츠
학습지원 프로그램
학부생 프로그램
대학원생 프로그램
학습상담
커뮤니케이션 과정
진단검사
글쓰기센터
글쓰기 프로그램
글쓰기 튜터링
글쓰기 클리닉
글쓰기 워크숍
우수리포트공모대회
온라인 글쓰기교실(OWL)
정보광장
공지사항
자주하는 질문
교양교과과정
자율연구
교육·학생지원
자료광장
규정
서식
자료실
홍보광장
뉴스레터
기초교육원 블로그
SNU 온라인 강좌가 있는 오후
갤러리
소개
인사말
교육목표
연혁
사람들
원장
부원장
부장교수
주임교수
연구교수
강의교수
사고와표현
외국어
수량적 분석과 추론
과학적 사고와 실험
컴퓨팅
행정실
교육기획부
글쓰기지원부
온라인교육부
교수학습센터
오시는 길
사이트맵
내부검색
통합검색
검색
내부검색
통합검색
검색어를 입력해주세요.
TOP
학부생 연구지원
교양교육과정
영역 및 교과목
교양교육과정 구성
영역별 교과목
학문의 기초
학문의 세계
선택교양
공통필수
대학글쓰기
대학영어
수강규정
수강자격 확인
유의사항
LAB 소개
영어 글쓰기 교실
자주하는질문
이수규정
대학별 이수규정
유의사항
대학글쓰기 교과목
제2외국어 교과목
수학 교과목
과학 교과목
신입생세미나·사회봉사 교과목
수강편람
SNUgenie
자율연구
창의와 도전
소개
창의와 도전 프로그램 소개
창의와 도전 프로그램 개요
개설강의목록
2023년
2022년
2021년
2020년
2019년
강의소개영상
촬영장비대여
학생자율교육프로그램
소개
프로그램 소개 및 유형
프로그램 목적
학생자율연구
프로그램 개요
교과목 수강자격
신청 및 이수과정
성적부여 및 유의사항
지도교수 및 대학원생조교
학생자율세미나
프로그램 개요
세미나 개설자격
신청 및 이수과정
지도교수 및 대학원생조교
성적부여 및 유의사항
가치탐구와 실천
프로그램 개요
프로그램 일정
연구지원
신청 및 선정절차
연구신청 및 수강조건
학부생 연구지원
프로그램 개요
연구신청 및 지원자격
신청 및 선정절차
연구지원
프로그램 일정
2024 온라인 포스터 세션
교육·학생지원
강의조교 (작은스승)
피어튜터링
소개
교과목 안내
인문사회
기초수학/과학
교과맞춤형
예비대학
예비대학이란?
예비대학 수강가이드
학생참여프로그램
휴먼튜브 영상 공모전
소개
지난대회
제7회
제6회
제5회
제4회
제3회
제2회
제1회
참가신청
SNU 토론한마당
소개
지난대회
제9회
제8회
제7회
제6회
제5회
제4회
제3회
제2회
제1회
참가신청
SNU 공공미술 프로젝트
소개
지난대회
제4회
제3회
제1회
참가신청
SNU 고전 100
소개
지난프로그램
SNU 고전 100 2023년 2학기
SNU 고전 100 2023년 1학기
SNU 고전 100 2022년 2학기
SNU 고전 100 2022년 1학기
SNU 고전 100 2021년 2학기
SNU 고전 100 2021년 1학기
SNU 고전 100 2020년 2학기
SNU 고전 100 2020년 1학기
SNU 고전 100 2019년 2학기
컴퓨팅 프로젝트 경진대회
소개
공지사항
자주 하는 질문
교수학습센터
교수지원 프로그램
교수법 워크숍
예비교수자 양성과정
강의 촬영 및 컨설팅
공과대학/자연과학대학 컨설팅
신규임용교원 강의컨설팅
온라인 교수법 콘텐츠
학습지원 프로그램
학부생 프로그램
대학원생 프로그램
학습상담
커뮤니케이션 과정
진단검사
글쓰기센터
글쓰기 프로그램
글쓰기 튜터링
글쓰기 클리닉
글쓰기 워크숍
우수리포트공모대회
온라인 글쓰기교실(OWL)
정보광장
공지사항
자주하는 질문
교양교과과정
자율연구
교육·학생지원
자료광장
규정
서식
자료실
홍보광장
뉴스레터
기초교육원 블로그
SNU 온라인 강좌가 있는 오후
갤러리
소개
인사말
교육목표
연혁
사람들
원장
부원장
부장교수
주임교수
연구교수
강의교수
사고와표현
외국어
수량적 분석과 추론
과학적 사고와 실험
컴퓨팅
행정실
교육기획부
글쓰기지원부
온라인교육부
교수학습센터
오시는 길
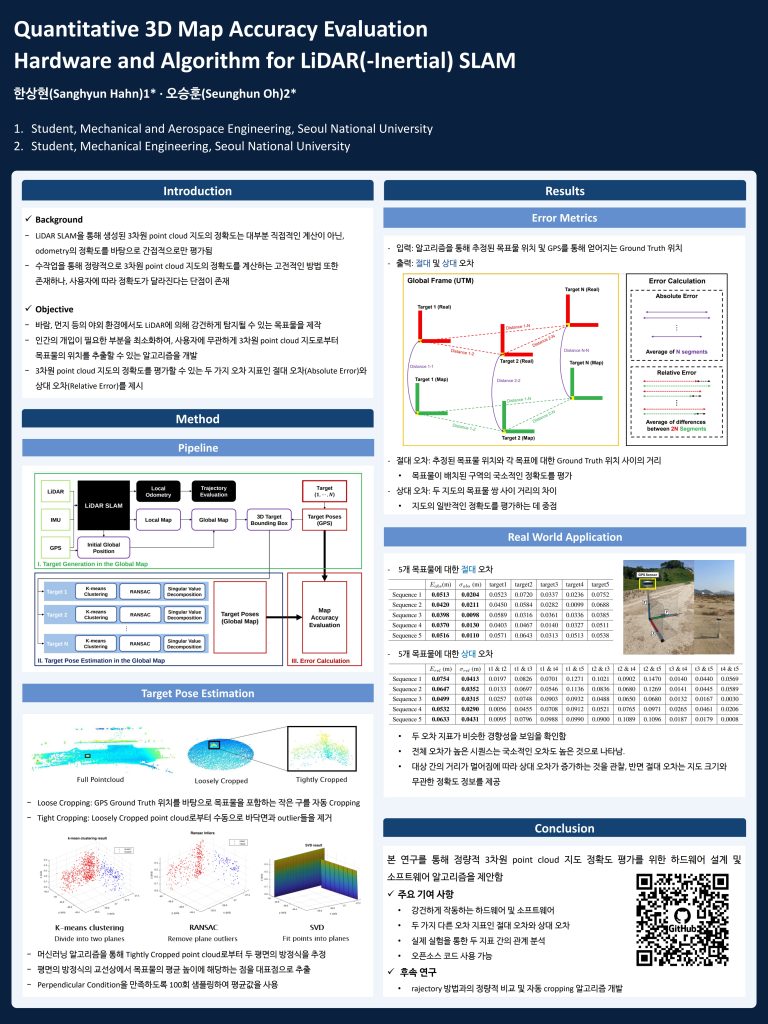
33. Quantitative 3D Map Accuracy Evaluation Hardware and Algorithm for LiDAR(-Inertial) SLAM (한상현, 오승훈)
작성자
기초교육원
작성일
2025-01-07
조회
9
답글쓰기
목록보기
다음
34. 소설적 상상력의 테크놀로지적 구현: 미셸 판데르아의 오페라 연구 (황박혜원)
이전
32. Investigation of Relationship between Vc,max, RuBisCO and Chlorophyll Contents, and ... (최수민, 이유진, 박지수)
전체 36
전체
제목
내용
작성자
검색
번호
제목
작성자
조회
작성일
36
36. 외막 다당체 구조 기반의 무름병균 동정 기술 개발 (황지희, 조희연)
기초교육원
12
2025-01-07
35
35. 3D 프린팅된 Auxetic 구조를 이용한 3차원 다방향 동적혈관 미세 환경 구현 (황영준, 이시현, 조관희)
기초교육원
14
2025-01-07
34
34. 소설적 상상력의 테크놀로지적 구현: 미셸 판데르아의 오페라 연구 (황박혜원)
기초교육원
8
2025-01-07
33
33. Quantitative 3D Map Accuracy Evaluation Hardware and Algorithm for LiDAR(-Inertial) SLAM (한상현, 오승훈)
기초교육원
9
2025-01-07
32
32. Investigation of Relationship between Vc,max, RuBisCO and Chlorophyll Contents, and ... (최수민, 이유진, 박지수)
기초교육원
8
2025-01-07
31
31. 한국 최초 3차원 핵융합로 기초설계 및 제작 타당성 분석 (정태근, 조재범, 장준영)
기초교육원
10
2025-01-07
30
30. 기후변화 대응을 위한 항공 LiDAR 데이터 및 위성영상 기반의 Local Climate Zone 모델 고도화 (정영서, 디타 앙그라이니, 이다현)
기초교육원
7
2025-01-07
29
29. One-step facile synthesis of Open Hierarchical ZSM-5: Influence of Temperature Ramping Rate on Morphology (정석우, 박지윤, 안다은)
기초교육원
8
2025-01-07
28
28. Synergistic Dual-Modal Therapy for Melanoma (전다혜, 서민경, 이여은)
기초교육원
9
2025-01-07
27
27. DeepXeno: Structure-Informed Prediction of Xenotransplantation Immunogenicity (장현우, 황운택, 박병호)
기초교육원
12
2025-01-07
26
26. 혼성어 형성 과제를 통한 대형 언어 모델의 음운적 제약 내재화 능력 평가 (임종원, 장한)
기초교육원
8
2025-01-07
25
25. Speciation and Extinction Dynamics of Mesozoic Ostracod Family Cyprideidae Martin, 1940 (임원섭)
기초교육원
9
2025-01-07
24
24. 중소기업을 통한 지역경제 활성화 방안 연구 (이준영)
기초교육원
12
2025-01-07
23
23. Scalable representation of random quantum circuits with projected entangled pair states (이성빈, 엄동현)
기초교육원
10
2025-01-07
22
22. 한양 정도(定都)와 지리 인식: '유교적 합리주의적 지리관'의 재검토 (이민환)
기초교육원
10
2025-01-07
21
21. 조직문화에 관한 구성원 경험 분석: 비공식네트워크를 중심으로 (이민규, 용지훈, 윤종민)
기초교육원
11
2025-01-07
20
20. Synthesis of Multi-Metal Nanoclusters and Investigation of Their Electrocatalytic Activity and Stability (이규한)
기초교육원
10
2025-01-07
19
19. 짜장면을 통해 본 한중 문화의 상호 침투와 교섭 (이건, 이지원)
기초교육원
8
2025-01-07
18
18. Refined Technique for Fabricating Twisted Bilayer of Freestanding Thin 3D Films (윤영재)
기초교육원
7
2025-01-07
17
17. Hierarchical Framework for Retrosynthesis Prediction with Enhanced Reaction Center Localization (윤성은)
기초교육원
6
2025-01-07
16
16. 부정확한 메타지각이 집단에 대한 태도와 평가에 미치는 영향: 한국 내 세대 관계를 중심으로 (윤선, 황서연)
기초교육원
10
2025-01-07
15
15. The Development of Autonomous Hybrid Wheelchairs for People of Reduced Mobility at Airports and Airplanes (송민아)
기초교육원
7
2025-01-07
14
14. Unveiling Hidden Extraordinary Properties of Miura-Ori Origami Structures (백채원, 정수연)
기초교육원
9
2025-01-07
13
13. 고동털개미의 둥지 선택에 따른 종분화 가능성 및 아까시흰구멍 버섯과의 관계성 연구 (배두리, 이승현, 함주현)
기초교육원
11
2025-01-07
12
12. Neuron-Astrocyte Metabolic Coupling Dynamics mediate ACC Chronic Pain Activation (박준서)
기초교육원
8
2025-01-07
11
11. Mosaic Habitat Composition Maintains Dorsal Color Polymorphism in Black-spotted Pond Frog (박정우, 최윤경, 이채윤)
기초교육원
8
2025-01-07
10
10. 반도체 산업 탄소중립을 위한 디지털 트윈 기반 재생에너지-수소에너지 통합 시스템 설계 (박재우, 이재만)
기초교육원
12
2025-01-07
9
9. 유도 발사체용 측추력기의 개발 및 응용 연구(김현서, 이석준)
기초교육원
7
2025-01-07
8
8. Evaluation of Electrochemical and Thermal Stability According to Dopant material type of Li rich cathode (박선호, 황도일)
기초교육원
12
2025-01-07
7
7. Buzzing sound and flight posture of the bean bug(Riptortus Pedestris) (김재승, 이하영)
기초교육원
6
2025-01-07
6
6. Chemical screening identifies “RK012” as a NLRP3 inflammasome inhibitor (김원영, 김소연)
기초교육원
10
2025-01-07
5
5. 쿠팡의 락인효과 검증 및 월회비 인상으로 인한 소비자 잉여 감소분 추정과 컨조인트 분석 (김수겸)
기초교육원
8
2025-01-07
4
4. Why do firms choose At-the-market Offering? (김서진)
기초교육원
12
2025-01-07
3
3. Development of High-Efficiency WBG PSCs through Enhanced Phase Purity in FA-Based 2D RP Perovskite Solar Cells (김건우)
기초교육원
9
2025-01-07
2
2. 팬데믹 시기 후각문화와 후각예술의 가치 (이지민, 강해담)
기초교육원
19
2025-01-07
1
1. 성과주의 담론 속 대안학교 재학생 경험: 별자리학교를 중심으로 한 후기구조주의적 질적 사례연구 (강수연, 강지후, 김예린)
기초교육원
29
2025-01-07
1
QUICK
MENU
교양교육과정
자율연구
교육·학생지원
교수학습센터
글쓰기센터
TOP